Oscillation d’un cylindre sur un chemin circulaire
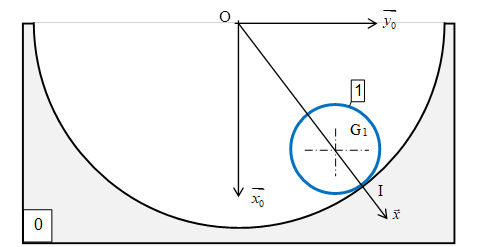
Un cylindre S1 de révolution, plein homogène de rayon r et de masse m, peut rouler sans glisser dans un cylindre S0, creux de rayon R. Les axes des deux cylindres sont horizontaux et parallèles.
Le mouvement de S1/S0 est défini par :
\(\phi =(\overrightarrow{{{x}_{0}}},\overrightarrow{x})\) paramétrant l’orientation du vecteur \(\overrightarrow{\text{O}{{\text{G}}_{1}}}\) par rapport à \(\overrightarrow{{{x}_{0}}}\)
\(\theta =(\overrightarrow{{{x}_{0}}},\overrightarrow{{{x}_{1}}})\) paramétrant la rotation propre de S1 par rapport à S0
Question
Ecrire l’équation traduisant le non-glissement entre S1 et S0 en \(\text{I}.\)
Solution
Tableau de bilan des inconnues et des équations
Inconnues | Equations | ||
Cinématiques : \(\varphi,\) \(\theta\) | 2 | Roulement sans glissement en \({\rm{I}}\) | 1 |
Dynamiques :
| 2 | Principe fondamental de la dynamique appliqué au solide 1 (cas plan) | 3 |
4 | 4 |
Bilan des actions s’exerçant sur le cylindre (1) :
le poids \(\left\{ {{T_{poids \to 1}}} \right\} = \left\{ {\begin{array}{*{20}{c}} {\overrightarrow {{P_1}} = mg\overrightarrow {{x_0}} }\\ {\overrightarrow {{M_{{P_1}}}({G_1})} = \overrightarrow 0 } \end{array}} \right\} = \left\{ {\begin{array}{*{20}{c}} {\overrightarrow {{P_1}} = mg\cos \varphi \overrightarrow x - mg\sin \varphi \overrightarrow y }\\ {\overrightarrow {{M_{{P_1}}}({G_1})} = \overrightarrow 0 } \end{array}} \right\}\)
l’action de contact imparfait \(\left\{ {{T_{0 \to 1}}} \right\} = \left\{ {\begin{array}{*{20}{c}} {\overrightarrow {{F_{01}}} = {X_{01}}\overrightarrow x + {Y_{01}}\overrightarrow y }\\ {\overrightarrow {{M_{01}}({\rm{I}})} = \overrightarrow 0 } \end{array}} \right\}\)
\(\Rightarrow \left( {R - r} \right)\dot \varphi + r\dot \theta = 0\quad (4)\)
\(\begin{array}{c} \overrightarrow {V\left( {{{\rm{G}}_{\rm{1}}},1/0} \right)} = \overrightarrow {V\left( {{{\rm{G}}_{\rm{1}}}/0} \right)} = {\left. {\frac{{d\overrightarrow {{\rm{O}}{{\rm{G}}_{\rm{1}}}} }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right){\left. {\frac{{d\overrightarrow x }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right)\left( {{{\left. {\frac{{d\overrightarrow x }}{{dt}}} \right|}_R} + \overrightarrow {{\Omega _{R/{R_0}}}} \wedge \overrightarrow x } \right) = \left( {R - r} \right)\left( {0 + \dot \varphi \overrightarrow z \wedge \overrightarrow x } \right)\\ = \left( {R - r} \right)\dot \varphi \overrightarrow y \end{array}\)
Relation de roulement sans glissement
En \({\rm{I}}\) : \(\overrightarrow {V({\rm{I,1/0}})} = \overrightarrow 0\)
\(\begin{array}{c} \overrightarrow {V({\rm{I,1/0}})} = \overrightarrow {V({{\rm{G}}_1}{\rm{,1/0}})} + \overrightarrow {{\rm{I}}{{\rm{G}}_{\rm{1}}}} \wedge \overrightarrow {{\Omega _{1/0}}} \\ = \left( {R - r} \right)\dot \varphi \overrightarrow y - r\overrightarrow x \wedge \dot \theta \overrightarrow z \\ = \left( {\left( {R - r} \right)\dot \varphi + r\dot \theta } \right)\overrightarrow y \end{array}\)
\(\Rightarrow \left( {R - r} \right)\dot \varphi + r\dot \theta = 0\quad (4)\)
\(\begin{array}{c} \overrightarrow {V\left( {{{\rm{G}}_{\rm{1}}},1/0} \right)} = \overrightarrow {V\left( {{{\rm{G}}_{\rm{1}}}/0} \right)} = {\left. {\frac{{d\overrightarrow {{\rm{O}}{{\rm{G}}_{\rm{1}}}} }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right){\left. {\frac{{d\overrightarrow x }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right)\left( {{{\left. {\frac{{d\overrightarrow x }}{{dt}}} \right|}_R} + \overrightarrow {{\Omega _{R/{R_0}}}} \wedge \overrightarrow x } \right) = \left( {R - r} \right)\left( {0 + \dot \varphi \overrightarrow z \wedge \overrightarrow x } \right)\\ = \left( {R - r} \right)\dot \varphi \overrightarrow y \end{array}\)
Question
Effectuer la mise en équations permettant d’étudier le mouvement de S1/S0.
Solution
Théorème de la résultante dynamique
\(\overrightarrow {{P_1}} + \overrightarrow {{F_{01}}} = m\overrightarrow {\Gamma ({{\rm{G}}_{\rm{1}}}/0)}\)
\(\overrightarrow {{\rm{O}}{{\rm{G}}_{\rm{1}}}} = \left( {R - r} \right)\overrightarrow x\)
\(\begin{array}{c} \overrightarrow {V\left( {{{\rm{G}}_{\rm{1}}}/0} \right)} = {\left. {\frac{{d\overrightarrow {{\rm{O}}{{\rm{G}}_{\rm{1}}}} }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right){\left. {\frac{{d\overrightarrow x }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right)\left( {{{\left. {\frac{{d\overrightarrow x }}{{dt}}} \right|}_R} + \overrightarrow {{\Omega _{R/{R_0}}}} \wedge \overrightarrow x } \right) = \left( {R - r} \right)\left( {0 + \dot \varphi \overrightarrow z \wedge \overrightarrow x } \right)\\ = \left( {R - r} \right)\dot \varphi \overrightarrow y \end{array}\) \(\begin{array}{c} \overrightarrow {\Gamma \left( {{{\rm{G}}_{\rm{1}}}/0} \right)} = \frac{d}{{dt}}\overrightarrow {V\left( {{{\rm{G}}_{\rm{1}}}/0} \right)} = \left( {R - r} \right){\left. {\frac{{d\dot \varphi \overrightarrow y }}{{dt}}} \right|_{{R_0}}} = \left( {R - r} \right)\left( {{{\left. {\frac{{d\dot \varphi \overrightarrow y }}{{dt}}} \right|}_R} + \overrightarrow {{\Omega _{R/{R_0}}}} \wedge \dot \varphi \overrightarrow y } \right) = \left( {R - r} \right)\left( {\ddot \varphi \overrightarrow y + \dot \varphi \overrightarrow z \wedge \dot \varphi \overrightarrow y } \right)\\ = \left( {R - r} \right)\left( {\ddot \varphi \overrightarrow y - {{\dot \varphi }^2}\overrightarrow x } \right) \end{array}\)
D’où \(\overrightarrow {{P_1}} + \overrightarrow {{F_{01}}} = m\overrightarrow {\Gamma ({{\rm{G}}_{\rm{1}}}/0)} \Leftrightarrow \left\{ {\begin{array}{*{20}{c}} {mg\cos \varphi + {X_{01}} = - m\left( {R - r} \right){{\dot \varphi }^2}}\\ { - mg\sin \varphi + {Y_{01}} = m\left( {R - r} \right)\ddot \varphi } \end{array}} \right.\)
Théorème du moment dynamique en G1
\(\overrightarrow {{M_{{P_1}}}({{\rm{G}}_{\rm{1}}})} + \overrightarrow {{M_{01}}({{\rm{G}}_{\rm{1}}})} = \overrightarrow {\delta ({{\rm{G}}_{\rm{1}}},1/0)}\)
\(\overrightarrow {\delta ({{\rm{G}}_{\rm{1}}},1/0)} = \frac{d}{{dt}}\overrightarrow {\sigma ({{\rm{G}}_{\rm{1}}},1/0)}\)
avec \(\overrightarrow {\sigma ({{\rm{G}}_{\rm{1}}},1/0)} = \overline{\overline {{I_{{G_1},1}}}} .\overrightarrow {{\Omega _{1/0}}} = {\left[ {\begin{array}{*{20}{c}} {\frac{{m\left( {3{r^2} + {h^2}} \right)}}{{12}}}&0&0\\ 0&{\frac{{m\left( {3{r^2} + {h^2}} \right)}}{{12}}}&0\\ 0&0&{\frac{{m{r^2}}}{2}} \end{array}} \right]_R}{\left( {\begin{array}{*{20}{c}} 0\\ 0\\ {\dot \theta } \end{array}} \right)_R} = \frac{{m{r^2}}}{2}\dot \theta \overrightarrow z\)
donc \(\overrightarrow {\delta ({{\rm{G}}_{\rm{1}}},1/0)} = \frac{{m{r^2}}}{2}{\left. {\frac{{d\dot \theta \overrightarrow z }}{{dt}}} \right|_{{R_0}}} = \frac{{m{r^2}}}{2}\ddot \theta \overrightarrow z\)
par ailleurs \(\overrightarrow {{M_{01}}({{\rm{G}}_{\rm{1}}})} = \overrightarrow {{M_{01}}({\rm{I}})} + \overrightarrow {{{\rm{G}}_{\rm{1}}}{\rm{I}}} \wedge \overrightarrow {{F_{01}}} = \overrightarrow 0 + {\left( {\begin{array}{*{20}{c}} r\\ 0\\ 0 \end{array}} \right)_R} \wedge {\left( {\begin{array}{*{20}{c}} {{X_{01}}}\\ {{Y_{01}}}\\ 0 \end{array}} \right)_R} = r{Y_{01}}\overrightarrow z\)
d’où \(r{Y_{01}} = \frac{{m{r^2}}}{2}\ddot \theta\)
Question
Déterminer le coefficient de frottement minimal pour que l’hypothèse de non glissement soit vérifiée, dans le cas où le cylindre S1 est lâché d’une position initiale \(\phi (t=0)={{\phi }_{0}}\) avec une vitesse nulle \(\ \dot{\phi }(t=0)=0\).
Solution
Coefficient de frottement pour non glissement, avec les équations du TRD sur x et y et du TMD en G1 :
Pour que le roulement soit sans glissement, il faut que l’effort tangentiel \(T\) soit inférieur à l’effort normal \(N\) au contact multiplié le coefficient de frottement \(f\) : \(\left| T \right| < f.\left| N \right|\).
Ce qui se traduit ici par : \(\left| {{Y_{01}}} \right| < f.\left| {{X_{01}}} \right|\quad \Rightarrow \quad\) \(f > \frac{{\left| {{Y_{01}}} \right|}}{{\left| {{X_{01}}} \right|}}\)
On va alors chercher à exprimer \({Y_{01}}\) et \({X_{01}}\) en fonction de la position du solide 1 par rapport à 0.
On dispose pour cela de l’équation cinématique de roulement sans glissement et des équations de la dynamique.
On a les 4 équations suivantes : \(mg\cos \varphi + {X_{01}} = - m\left( {R - r} \right){\dot \varphi ^2}\) \(\left\{ {\begin{array}{*{20}{r}} {mg\cos \varphi + {X_{01}} = - m\left( {R - r} \right){{\dot \varphi }^2}}&{(1)}\\ { - mg\sin \varphi + {Y_{01}} = m\left( {R - r} \right)\ddot \varphi }&{(2)}\\ {r{Y_{01}} = \frac{{m{r^2}}}{2}\ddot \theta }&{(3)}\\ {\left( {R - r} \right)\dot \varphi + r\dot \theta = 0}&{(4)} \end{array}} \right.\)
D’après (2), \({Y_{01}} = m\left( {R - r} \right)\ddot \varphi + mg\sin \varphi\)
En dérivant (4), \(on a \left( {R - r} \right)\ddot \varphi = - r\ddot \theta\) et en la combinant avec (3) on obtient \(\left( {R - r} \right)\ddot \varphi = - \frac{2}{m}{Y_{01}}.\)
En remplaçant dans (2), on a \({Y_{01}} = - 2{Y_{01}} + mg\sin \varphi\) \(\Rightarrow {Y_{01}} = \frac{{mg\sin \varphi }}{3}\)
D’après (1), \({X_{01}} = - m\left( {R - r} \right){\dot \varphi ^2} - mg\cos \varphi\)
On cherche à tout exprimer en fonction de \(\varphi\). Pour cela, on intègre \(\ddot \varphi = - \frac{2}{{\left( {R - r} \right)m}}{Y_{01}} = - \frac{{2g}}{{3\left( {R - r} \right)}}\sin \varphi\), ce qui nous donne \(\frac{{{{\dot \varphi }^2}}}{2} = \frac{{2g}}{{3\left( {R - r} \right)}}\cos \varphi + cte\)
On détermine la constante d’intégration avec les conditions initiales \(\varphi (t = 0) = {\varphi _0}\) et \(\dot \varphi (t = 0) = 0\) :
\(cte = - \frac{{2g}}{{3\left( {R - r} \right)}}\cos {\varphi _0}\)
Donc en remplaçant dans l’expression de \({X_{01}}\) :
\({X_{01}} = - m\left( {R - r} \right)2\left( {\frac{{2g}}{{3\left( {R - r} \right)}}\cos \varphi - \frac{{2g}}{{3\left( {R - r} \right)}}\cos {\varphi _0}} \right) - mg\cos \varphi = - \frac{{4mg}}{3}\left( {\cos \varphi - \cos {\varphi _0}} \right) - mg\cos \varphi\)
Le coefficient de frottement doit donc être supérieur à la valeur suivante :
\(f > \frac{{\left| {{Y_{01}}} \right|}}{{\left| {{X_{01}}} \right|}} = \frac{{\left| {\frac{{\sin \varphi }}{3}} \right|}}{{\left| { - \frac{4}{3}\left( {\cos \varphi - \cos {\varphi _0}} \right) - \cos \varphi } \right|}}\)
A \(t = 0\), \(f > \frac{{\left| {{Y_{01}}} \right|}}{{\left| {{X_{01}}} \right|}} = \frac{{\left| {\tan {\varphi _0}} \right|}}{3}\)
\(0 < \varphi < {\varphi _0} < \frac{\pi }{2}\) \(\Rightarrow\) \(\begin{array}{l} \sin \varphi < \sin {\varphi _0}\\ \cos \varphi > \cos {\varphi _0} \end{array}\) \(\Rightarrow\) \(f > \frac{{\left| {\tan {\varphi _0}} \right|}}{3} > \frac{{\left| {\frac{{\sin \varphi }} {3}} \right|}}{{\left| { - \frac{4}{3}\left( {\cos \varphi - \cos {\varphi _0}} \right) - \cos \varphi } \right|}}\)
Question
Etudier les petits mouvements \(\bar{\phi }\) du cylindre autour de la position d’équilibre \({{\phi }_{e}}=0,\) pour les conditions initiales \(\phi (t=0)={{\phi }_{0}}\), \(\ \dot{\phi }(t=0)=0\).
Solution
On souhaite étudier les petits mouvements du solide 1 par rapport à 0 autour de la position d’équilibre \(\varphi = 0\).
On obtient alors l’équation différentielle régissant l’évolution du paramètre \(\varphi\) :
\(- \frac{3}{2}mr\left( {R - r} \right)\ddot \varphi = mgr\sin \varphi \quad \Rightarrow \quad - \frac{3}{2}\left( {R - r} \right)\ddot \varphi = g\sin \varphi\)
Si \(\varphi\) petit alors \(\sin \varphi \approx \varphi \quad \Rightarrow \quad \ddot \varphi + \frac{{2g}}{{3\left( {R - r} \right)}}\varphi = 0\)
C’est une équation différentielle du second ordre à coefficients constants de type \(\ddot \varphi + {\omega ^2}\varphi = 0\) dont les solutions sont de la forme \(\varphi \left( t \right) = A\cos \left( {\omega \,t + B} \right)\)
On détermine les constantes \(A\) et \(B\) à partir des conditions initiales, \(\varphi (t = 0) = {\varphi _0}\) et \(\dot \varphi (t = 0) = 0\) :
\(\dot \varphi \left( 0 \right) = - A\omega \sin \left( {\omega \,0 + B} \right) = 0 \Rightarrow \sin \left( B \right) = 0 \Rightarrow B = 0\left[ \pi \right]\)
\(\varphi \left( 0 \right) = A\cos \left( {\omega \,0 + 0} \right) = {\varphi _0} \Rightarrow A = {\varphi _0}\)
On a finalement \(\varphi \left( t \right) = {\varphi _0}\cos \left( {\omega \,t} \right)\)
Question
Appliquer le théorème de l’énergie cinétique au solide 1.
Solution
Calcul de l’énergie cinétique
L’énergie cinétique du cylindre est :
\(\begin{array}{c} {T_{1/0}} = \frac{1}{2}m{\overrightarrow {V({{\rm{G}}_1}/0)} ^2} + \frac{1}{2}\overrightarrow {{\Omega _{1/0}}} \overline{\overline {{I_{{{\rm{G}}_1},1}}}} \overrightarrow {{\Omega _{1/0}}} \\ = \frac{1}{2}m{\left( {\left( {R - r} \right)\dot \varphi \overrightarrow y } \right)^2} + \frac{1}{2}{\left( {\begin{array}{*{20}{c}} 0&0&{\dot \theta } \end{array}} \right)_{0,1}}{\left[ {\begin{array}{*{20}{c}} .\\ .\\ 0 \end{array}\begin{array}{*{20}{c}} .\\ .\\ 0 \end{array}\begin{array}{*{20}{c}} 0\\ 0\\ {\frac{{m{r^2}}}{2}} \end{array}} \right]_{0,1}}{\left( {\begin{array}{*{20}{c}} 0\\ 0\\ {\dot \theta } \end{array}} \right)_{0,1}}\\ = \frac{1}{2}m{\left( {R - r} \right)^2}{{\dot \varphi }^2} + \frac{1}{2}\frac{{m{r^2}}}{2}{{\dot \theta }^2} \end{array}\)
On a l’équation de liaison de roulement sans glissement : \(\left( {R - r} \right)\dot \varphi + r\dot \theta = 0\)
Donc \({T_{1/0}} = \frac{3}{4}m{\left( {R - r} \right)^2}{\dot \varphi ^2}\)
Calcul des puissances
Puissance développée par la pesanteur
\({P_{pes \to 1/0}} = mg\overrightarrow {{x_0}} .\overrightarrow {V({{\rm{G}}_1}/0)} = mg\overrightarrow {{x_0}} .\left( {R - r} \right)\dot \varphi \overrightarrow y = - \sin \varphi \,mg\left( {R - r} \right)\dot \varphi\)
Fonction de force de pesanteur : \({U_{pes}} = mg{x_{{\rm{0}}{{\rm{G}}_1}}} + cte = mg\left( {R - r} \right)\cos \varphi \, + cte\)
\({P_{pes \to 1/0}} = \frac{{d{U_{pes}}}}{{dt}} = - mg\left( {R - r} \right)\dot \varphi \sin \varphi \,\)
Puissance développée par le contact (roulement sans glissement) :
\({P_{0 \to 1/0}} = \overrightarrow {{F_{0 \to 1}}} .\overrightarrow {V({\rm{I,1}}/0)} + \overrightarrow {{M_{0 \to 1}}({\rm{I}})} .\overrightarrow {{\Omega _{1/0}}} = \overrightarrow {{F_{0 \to 1}}} .\overrightarrow 0 + \overrightarrow 0 .\overrightarrow {{\Omega _{1/0}}} = 0\)
Théorème de l’énergie cinétique
\(\frac{{d{T_{\Sigma /0}}}}{{dt}} = {P_{ext \to \Sigma /0}} + {P_{int}} \quad \Rightarrow \quad \frac{3}{2}m{\left( {R - r} \right)^2}\dot \varphi \ddot \varphi = - mg\left( {R - r} \right)\dot \varphi \sin \varphi \, \quad \Rightarrow \quad \frac{3}{2}\left( {R - r} \right)\ddot \varphi + g\sin \varphi \, = 0\)
Remarque :
Seules les actions dérivant de fonction de force travaillent, on peut donc écrire le théorème sous sa forme intégrée :
\({T_{\Sigma /0}} - {U_{pes}} = cte \quad \Rightarrow \quad \frac{3}{4}m{\left( {R - r} \right)^2}{\dot \varphi ^2} + mg\left( {R - r} \right)\cos \varphi \, = cte \quad \Rightarrow \quad \frac{3}{4}\left( {R - r} \right){\dot \varphi ^2} + g\cos \varphi \, = cte\)