Composition des mouvements et des vitesses
Soient deux repères \({R_i}\) et \({R_j}\) mobiles l’un par rapport à l’autre et un point \({\rm{P}}\) en mouvement par rapport à ceux-ci.
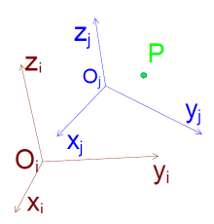
La vitesse du point \({\rm{P}}\) par rapport au repère \({R_i}\) est :
\(\overrightarrow {V({\rm{P}}/i)} = {\left( {\frac{d}{{dt}}\overrightarrow {{{\rm{O}}_i}{\rm{P}}} } \right)_i}\)
La vitesse du point \({\rm{P}}\) par rapport au repère \({R_j}\) est :
\(\overrightarrow {V({\rm{P}}/j)} = {\left( {\frac{d}{{dt}}\overrightarrow {{{\rm{O}}_j}{\rm{P}}} } \right)_j}\)
La vitesse du point \({\rm{P}}\) dans le mouvement de \({R_j}\) par rapport au repère \({R_i}\) est :
\(\overrightarrow {V({\rm{P}},j/i)} = \overrightarrow {V({\rm{P}}/i)} - \overrightarrow {V({\rm{P}}/j)}\)
Cette vitesse correspond à la vitesse qu’aurait le point \({\rm{P}}\) à l’instant \(t\) s’il était fixe dans \({R_j}.\)
Démonstration
\(\begin{array}{c} \overrightarrow {V({\rm{P}}/i)} = {\left( {\frac{d}{{dt}}\overrightarrow {{{\rm{O}}_i}{\rm{P}}} } \right)_i}\\ = {\left( {\frac{d}{{dt}}\overrightarrow {{{\rm{O}}_i}{{\rm{O}}_j}} } \right)_i} + {\left( {\frac{d}{{dt}}\overrightarrow {{{\rm{O}}_j}{\rm{P}}} } \right)_i}\\ = \overrightarrow {V({{\rm{O}}_j}/i{\rm{)}}} + {\left( {\frac{d}{{dt}}\overrightarrow {{{\rm{O}}_j}{\rm{P}}} } \right)_j} + \overrightarrow {{\Omega _{j/i}}} \wedge \overrightarrow {{{\rm{O}}_j}{\rm{P}}} \\ = \overrightarrow {V({{\rm{O}}_j}/i)} + \overrightarrow {V({\rm{P}}/j)} + \overrightarrow {{\Omega _{j/i}}} \wedge \overrightarrow {{{\rm{O}}_j}{\rm{P}}} \end{array}\)
On reconnaît l’expression \(\overrightarrow {V({{\rm{O}}_j}/i)} + \overrightarrow {{\Omega _{j/i}}} \wedge \overrightarrow {{{\rm{O}}_j}{\rm{P}}} = \overrightarrow {V({\rm{P,}}j/i)}\) du champ des vitesse dans le cas où \({\rm{P}}\) fixe dans \({R_j}.\)
Donc \(\overrightarrow {V({\rm{P}}/i)} = \overrightarrow {V({\rm{P}}/j)} + \overrightarrow {V({\rm{P,}}j/i)}.\)
Si un point est fixe par rapport à un solide auquel est lié un repère \({R_k}\) alors sa vitesse par rapport à ce repère est nulle : \(\overrightarrow {V({\rm{P}}/k)} = \overrightarrow 0\) d’où \(\overrightarrow {V({\rm{P,}}k/i)} = \overrightarrow {V({\rm{P}}/i)} - \overrightarrow 0 = \overrightarrow {V({\rm{P}}/i)}.\)
Le mouvement d’un solide peut également être décomposé en passant par un repère intermédiaire :
\(\begin{array}{*{20}{l}} {\overrightarrow {V({\rm{P}},k/i)} }&{ = \overrightarrow {V({\rm{P}}/i)} - \overrightarrow {V({\rm{P}}/k)} }\\ {}&\begin{array}{l} = \overrightarrow {V({\rm{P}}/i)} - \overrightarrow {V({\rm{P}}/j)} + \overrightarrow {V({\rm{P}}/j)} - \overrightarrow {V({\rm{P}}/k)} \\ = \overrightarrow {V({\rm{P}},j/i)} + \overrightarrow {V({\rm{P}},k/j)} \end{array} \end{array}\)
\(\overrightarrow {V({\rm{P,}}k/i)} = \overrightarrow {V({\rm{P,}}k/j)} + \overrightarrow {V({\rm{P,}}j/i)}\)
Exemple : Individu marchant sur un tapis roulant
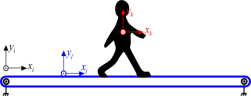
L’individu marche à une vitesse \(\overrightarrow {V({\rm{G,}}k/j)}\) par rapport au tapis et le tapis avance à une vitesse \(\overrightarrow {V({\rm{G,}}j/i)}.\) L’individu se déplace donc à une vitesse \(\overrightarrow {V({\rm{G,}}k/i)} = \overrightarrow {V({\rm{G,}}k/j)} + \overrightarrow {V({\rm{G,}}j/i)}\) par rapport au sol.
De même, les vecteurs de vitesses de rotation peuvent être décomposés :
\(\overrightarrow {{\Omega _{k/i}}} = \overrightarrow {{\Omega _{k/j}}} + \overrightarrow {{\Omega _{j/i}}}\)