Paramétrage de la position et de l’orientation d’un repère par rapport à un autre
On appelle « paramètres » d'un système les n variables qui permettent d’obtenir les coordonnées de tous les points de ce système.
Chaque solide est généralement repéré par rapport au précédent dans la chaîne cinématique (paramétrage relatif). Il y a alors autant de paramètres cinématiques que de degrés de mobilité dans la liaison entre les deux solides.
Cependant, on repère parfois un solide par rapport au solide de référence (paramétrage absolu) pour des raisons liées aux objectifs visés (exemple : paramétrage du châssis d’un véhicule par rapport au sol).
Le choix du paramétrage n’est pas unique et peut avoir une influence importante sur le temps de résolution d’un problème.
Pour paramétrer un système, on attache un ou plusieurs repères (base + origine) orthonormés directs à chacun des solides. On isole pour cela le solide du mécanisme, on identifie ses directions privilégiées (axes de ces liaisons) et on les nomme de façon judicieuse par rapport à la chaine cinématique. Il y aura plusieurs repères liés un solide si les directions privilégiées ne sont pas orthogonales.
On paramètre ensuite les liaisons.
On réalise pour les paramètres de rotations des « figures de changement de base » : l’angle est représenté dans le premier cadran avec le vecteur directeur de l’axe de rotation perpendiculaire au plan de la feuille et orienté vers soi. L’angle est orienté d’un vecteur de la base «horizontale-verticale» vers un vecteur de la base «oblique».
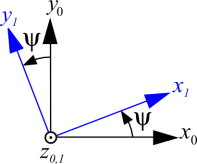
Paramètre de rotation \(\psi = \left( {\overrightarrow {{x_0}} ,\overrightarrow {{x_1}} } \right) = \left( {\overrightarrow {{y_0}} ,\overrightarrow {{y_1}} } \right)\) autour de l’axe \(\overrightarrow {{z_{01}}}.\)