Repérage d’un solide
Six coordonnées (ou paramètres) sont nécessaires pour repérer un solide dans l’espace : trois pour la position (comme pour un point) et trois pour l’orientation (ou rotation).
Si le mouvement s’effectue dans un plan, 3 paramètres suffisent pour repérer un solide dans le plan : deux pour la position et un pour l’orientation autour de l’axe perpendiculaire au plan.
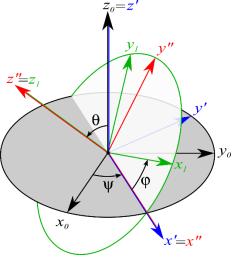
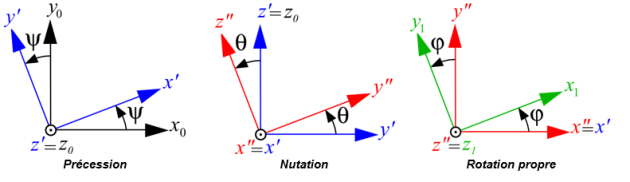
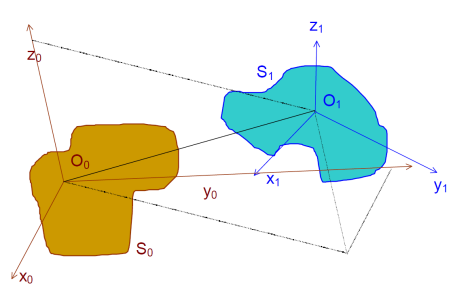
On utilise généralement le paramétrage d’Euler (de type 1) pour définir les rotations. On définit pour cela deux repères intermédiaires entre le repère du solide \({R_1}\left( {{{\rm{O}}_{\rm{1}}},\overrightarrow {{x_1}} ,\overrightarrow {{y_1}} ,\overrightarrow {{z_1}} } \right)\) et le repère de référence \({R_0}\left( {{{\rm{O}}_{\rm{0}}},\overrightarrow {{x_0}} ,\overrightarrow {{y_0}} ,\overrightarrow {{z_0}} } \right)\).